
ECDIS operator must be be familiar with the use of the ECDIS (Electronic Chart Display and Information System), considering that the operational techniques and methods of cross-checking will vary, depending on the area of navigation:
- Pilotage and Confined Waters. During pilotage and confined waters navigation, the system is to be used in conjunction with radar information overlay (RIO), if available, to confirm GNSS positions.
The ECDIS operator is to ensure that additional fixing methods, such as visual and radar, are used to confirm GNSS positions.
During restricted visibility, the ECDIS operator should use ECDIS together with a dedicated radar display.
- Coastal Navigation. While operating in coastal waters, the ECDIS operator should monitor the radar coastline layer on the chart using the RIO, where practical, and cross-check the position of the ship using visual or radar means to prove the accuracy of GNSS.

- Ocean Navigation. The primary source of positional information will be GNSS, checked periodically using celestial means when possible.
Page Contents
Equipment Required for the operation of ECDIS
Type approved ECDIS units are capable of displaying the full range of official electronic charts in conjunction with navigation sensor information.
Each ECDIS unit will also be capable of independent operation and is provided with an uninterruptible power supply (UPS) to ensure continued operation in the event of short power failures

Minimum of 30 minutes
System Configuration and Maintenance
ECDIS must be configured appropriately before sailing and on passage.
The ECDIS operator is to ensure that the systems are configured appropriately, with special regard to chart priority, sensor offsets, ship specific data and security settings.
The ECDIS operator is to ensure that all appropriate ENCs for the area of operation are installed and updated.
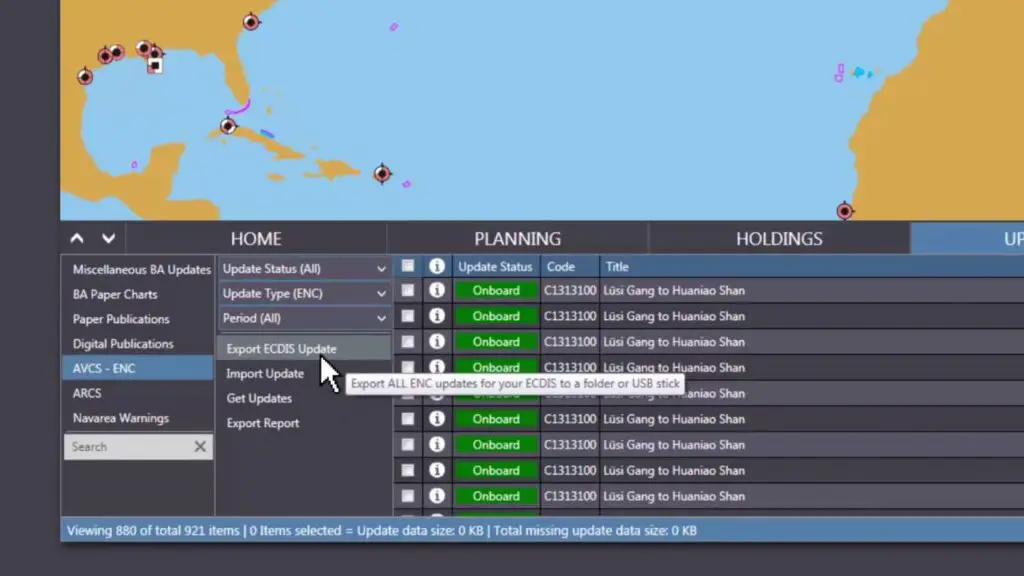
All ENC updates are to be logged properly and the systems annotated with the number of the latest update installed.
Following an update, a check of the intended route is to be conducted in addition to an appropriate spot check of the entire folio of installed ENCs.
The ECDIS operator is to ensure that the systems are configured so that it is possible to reconstruct the ship’s track from recorded ECDIS data.
Double ECDIS ON BOARD of ships
Where ships carry a primary and secondary ECDIS, each unit must be configured with the same safety settings.
Where two GNSS sensors are available, each ECDIS must be able to switch between the two sensors.
ECDIS operators must be familiar with this function and be aware of which GNSS sensor supplies each unit with position information.
It is recommended the GNSS sensor in use is periodically changed.
If each ECDIS unit uses a different GNSS sensor, it will allow the ECDIS operator to monitor divergence between the GNSS sensors.
Master’s on board of ships have the discretion to modify safety settings as the navigational situation dictates, with suitable risk management measures and supervision in place.
Such deviations from standard practice are to be stated appropriately in the relevant OOW instructions or the Standing Orders Book.
Charting and RCDS Mode

All units are to carry an outfit of up to date electronic charts that provide adequate coverage of the intended operating area at an appropriate scale.
Official chart data, derived from government authorised Hydrographic Officers are to be used for safe navigation.
Official chart data is to include Electronic Navigational Charts (ENC} and may also include Raster Navigational Charts (RNC} and official paper charts.
If utilising RNCs for navigation then ECDIS must be in Raster Chart Display System mode (RCDS) and an appropriate portfolio of paper charts (APC} is to be carried in line with IMO Circular 207 Differences between RCDS and ECD/5, or as required by the individual flag State.
Where possible an ENC must be used. However, when operating in areas without ENC coverage then RNCs or paper charts must be used.
It should be noted that the best scale chart available in ECDIS may be an RNC if such data is installed, and therefore the ECDIS operator must be fully aware of the requirements and limitations of RCDS mode.
The requirements for an APC are stated in IMO Circular MSC.1/Circ.1503/Rev.1, ECD/5- Guidance for Good Practice, which has revoked and replaced several ECDIS related circulars.
However, the IMO does not define the word ‘appropriate’ and does not specify the size or content of the portfolio.
This is the responsibility of the flag State and the ECDIS operator must be fully aware of the requirements of the flag.
All ECDIS are to be kept fully up to date.
This includes ENC updates, Notices to Mariners (NTM), Temporary and Preliminary Notices to Mariners (T&Ps), Navigation Warnings and manually applied updates in the form of manual corrections.
Sensor Inputs
There are three mandatory sensor inputs to ECDIS, as stated in IMO MSC 232(82):
1-ECDIS should be connected to systems providing continuous position fixing capability (GNSS)
2- ECDIS should be connected to the ship’s gyrocompass. For ships not fitted with a gyrocompass, ECDIS should be connected to a marine transmitting heading device.
3-ECDIS should be connected to the speed and distance measuring device (log).
Apart from the three mandatory inputs prescribed by the IMO, many other sensors may be interfaced.
However, ECDIS should not degrade the performance of any equipment providing sensor inputs, nor should the connection of optional equipment degrade the performance of ECDIS to below the IMO MSC 232(82) standard.
ECDIS may also be used to provide ENC information to external equipment, such as radar.
To provide redundancy of sensors, a typical ECDIS configuration may be as follows:
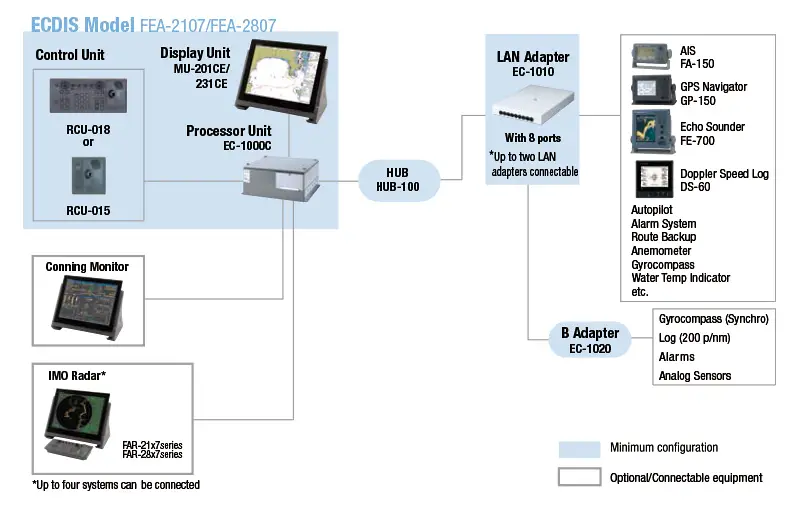
- GPS 1
- GPS 2
- GYRO 1
- GYRO 2
- Log
- AIS
- Echo sounder
- Anemometer
- NAVTEX
- ARPA 1
- ARPA 2.
The ECDIS operator should be aware of how to select a backup or manual input available on their system.
All sensor inputs to ECDIS must be properly configured and calibrated during ECDIS installation.
Failure to do so will result in inherent errors in the system.
The ECDIS operator should regularly check the accuracy of sensors using all available means, such as the methods
listed below, to ascertain any errors.
If an error is discovered, the ECDIS operator must investigate it and take appropriate action.
• GNSS – cross-check accuracy by regularly conducting operator fixes using visual and other means
• gyro – maintain awareness of gyro errors, repeater errors, availability of backup heading information
• log – check accuracy by using the measured mile method or similar technique
• echo sounder – check accuracy using a lead line or reference depth method
• radar – check accuracy by regularly conducting Index Error checks and operator fixes. RIO can be used to check the radar against GNSS.